

Benutzerdefinierte BLDC-Steuerung
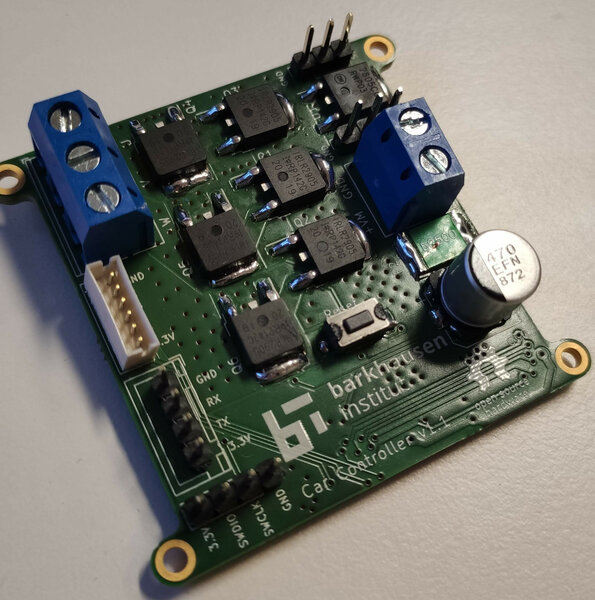
Das Team unseres Connected Robotics Labs entwickelte einen eigenen BLDC-Controller mit allen Funktionen, die es für seinen spezifischen Anwendungsfall benötigte.
Für unseren Platooning-Demonstrator werden kleine ferngesteuerte Hobby-Fahrzeuge als Basis für die Modellautos verwendet. Im Laufe der Zeit benötigte das CoRoLa-Team mehr Funktionen als der standardmäßige elektronische Geschwindigkeitsregler (ESC) bot. Nach einer unbefriedigenden Zwischenlösung beschloss das Team, einen eigenen ESC/Motor-Controller mit allen Funktionen zu entwickeln, die sie für ihre Anwendung brauchten.
In ihrem neuesten CoRoLa-Blog-Beitrag beschreiben sie ihren Ansatz und ihre Erfahrungen.