Low-Latency Robotic Airhockey
5G mobile communications are going to contribute significantly to the digitalization of industrial production (Industry 4.0). Mobile robots will be jointly manufacturing workpieces according to individual requests. The essential feature will be the use of sensorics at the installation site, joint signal processing, and remote control of the robots. Due to the mobility of the robots, communication between all components will be wireless. Since the inevitable time delay (latency) in data transmission makes precise and fluid motion difficult, future wireless transmission techniques will require a very low latency (approx. 1 ms).
At the BI, we have set up a demonstrator that directly shows the effect of too high latency for time-critical applications. To this end, we implemented a robotic Airhockey table where the robot control is performed over a wireless connection. Users can adjust the latency on the wireless link and immediately see the robot accuracy degrade. In the 3G mode, which means there are 150ms reaction time of the robot, the robot cannot hit the puck accurately and it is easy to beat. However, in the 5G mode with 1ms reaction time, the robot moves accurately and is quite hard to beat. You are invited to visit us and try out the robot on your own!
Key components of the demonstrator
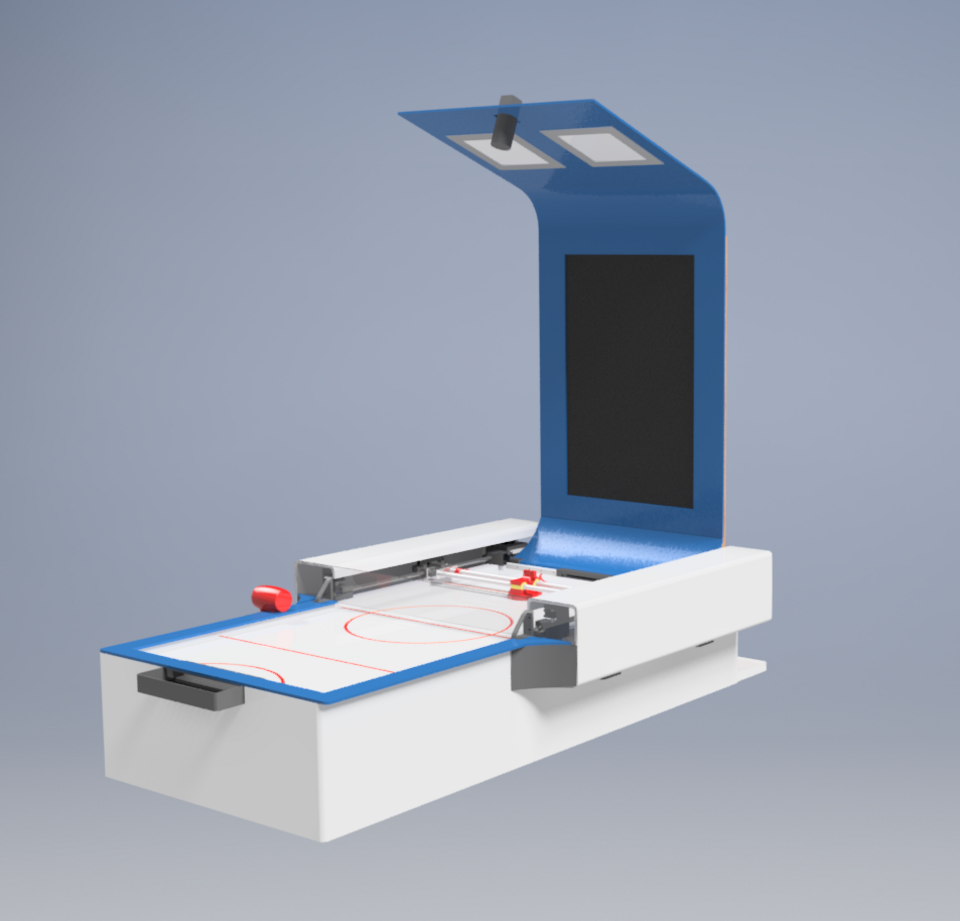
I - The mechanical construction and case
I - The mechanical construction and case
The mechanical construction was designed on the PC, before we assembled it in reality.

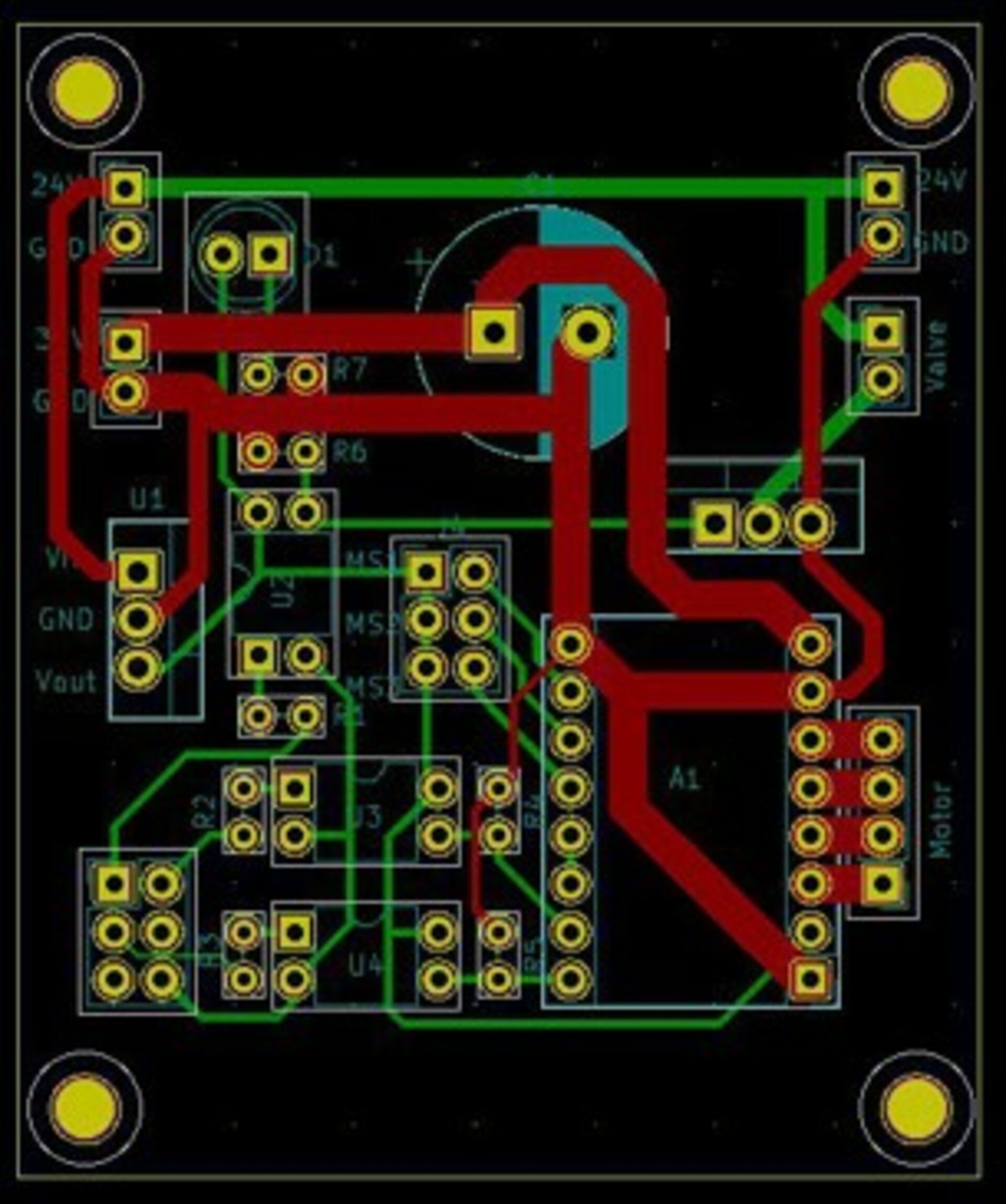
II - Electrical components
The electric components such as motor drivers,
sensors and microcontrollers have first been designed on the PC, before they are assembled and tested in reality.
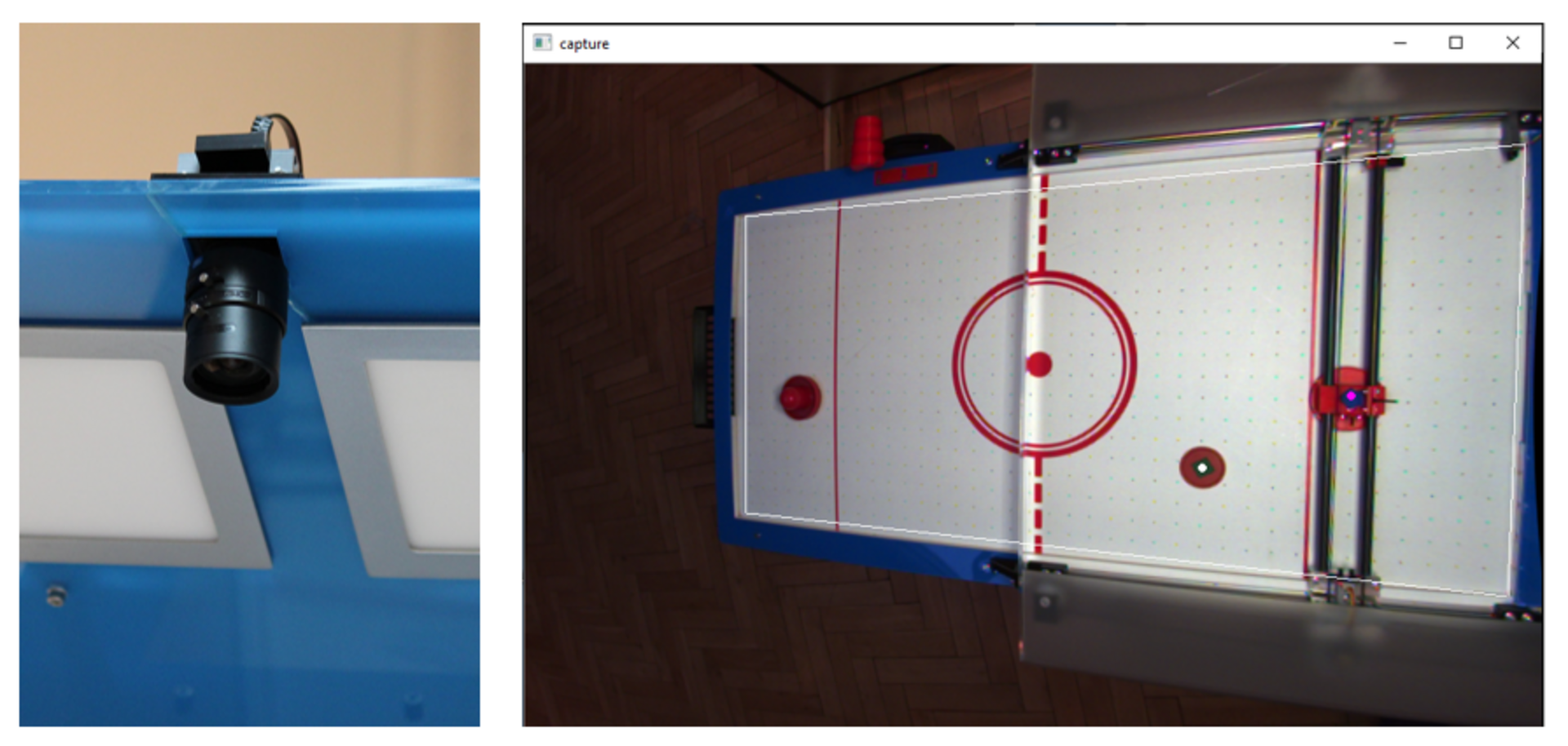
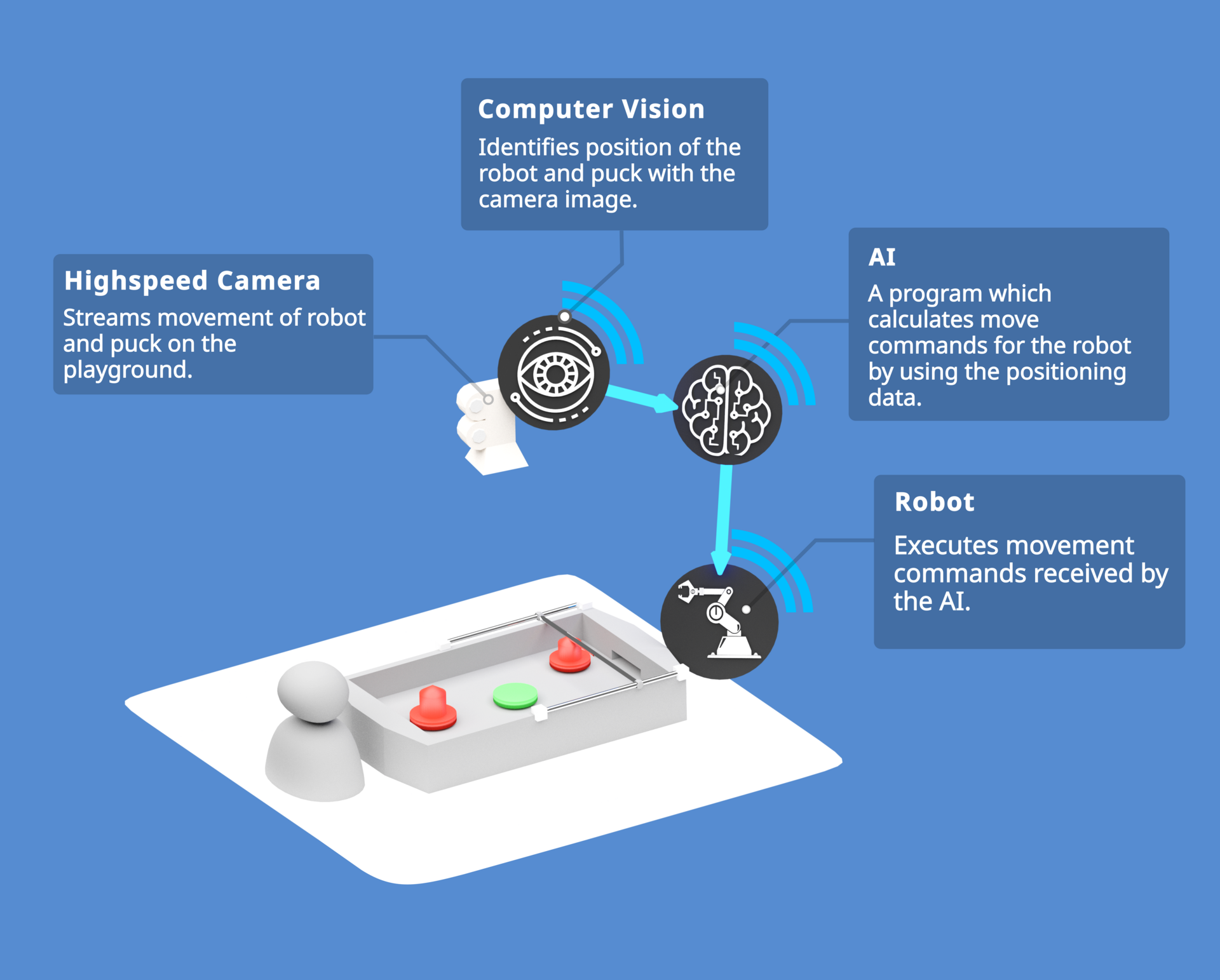
III - The camera and image processing
In order to have quick response times, the employed camera runs with 200 frames per second. Each recorded image is processed to detect puck and robot position.
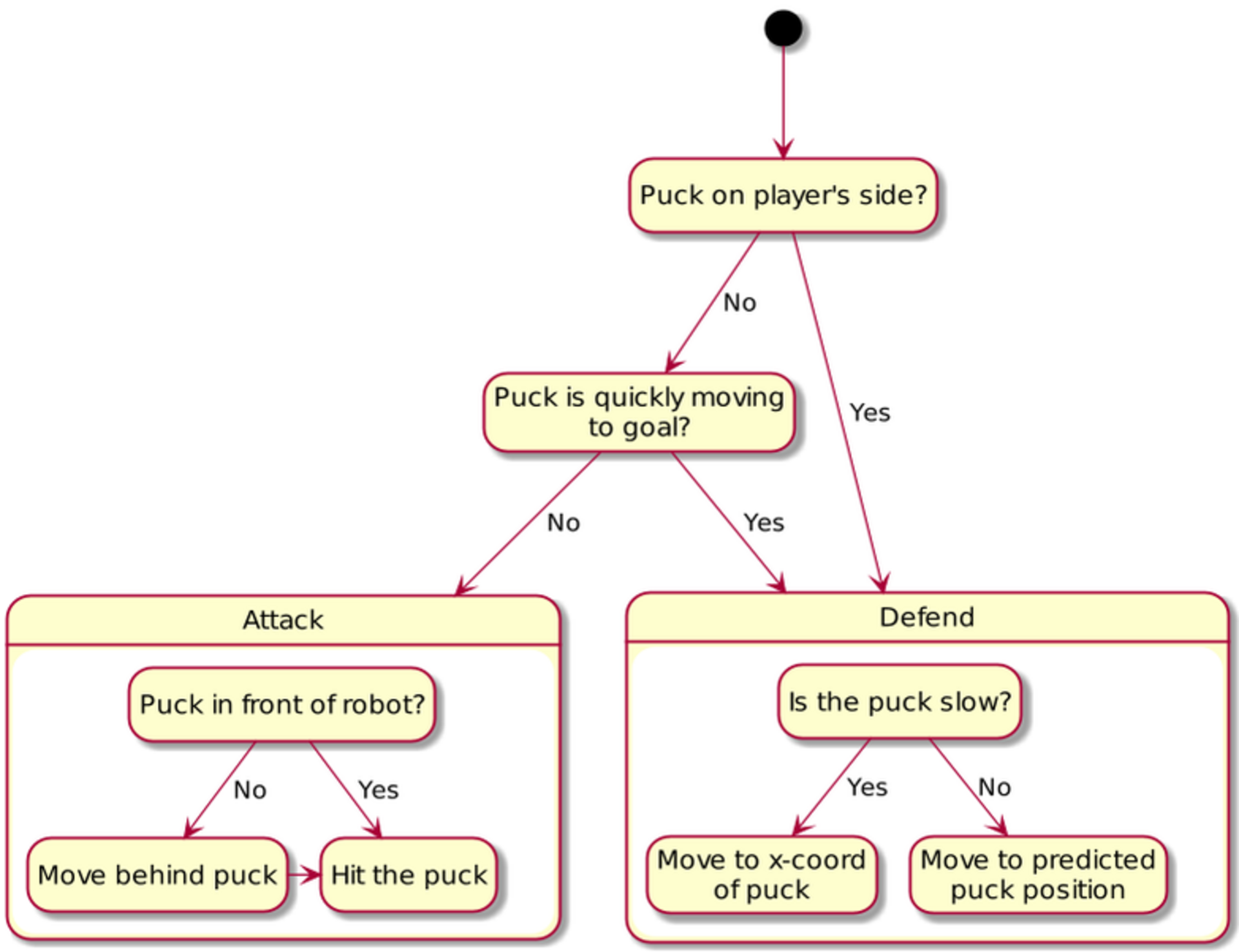
IV - The robot's brain to calculate robot movement
In the first version, the robot's brain was implemented by a deterministic state machine. In short, this state machine deterministically maps the game state (i.e. puck position and speed, and robot position) to a desired movement of the robot. The movement is calculated by an explicit sequence of decisions (e.g. if puck is in own or opponents half, if puck moves fast or slowly etc.).
V - Low latency wireless link
The Low latency wireless link transports robot commands from the PC to the robot. The wireless connection implements a 5G-like system, using GFDM as the physical layer (PHY) waveform. The link supports multiple users and allows end-to-end latencies below 1ms. The signal processing is implemented in real-time on an FPGA within National Instruments USRP 2974 devices.